

Roboty
 |
Matty
— terénní robot
Robot s nezávislým pohonem všech kol a kloubem se dvěma stupni volnosti,
jedním
Aneb jak navrhnout a postavit robota za 1 měsíc. Aktualizace: 3.9.2025 Matty M04 a M05 |
 |
Rocker
— terénní robot
Robota s nezávislým pohonem a řízením všech kol jsem si chtěl postavit již dávno.
Konečně jsem objevil vhodné pohony - robotická serva (WaveShare ST3215),
která splnila téměř všechny požadavky (a za rozumnou cenu).
A tak vznikl robot se čtyřkolovým podvozkem typu rocker-bogie.
Aktualizace: 24.7.2024 Jízda po trase |
 |
Card Dealer
— automatický rozdavač karet
Model by postaven jako závěrečný projekt oboru Automatizační technika a robotika.
Slouží k automatickému rozdávání karet. Lze nastavit počet hráčů, jejich rozmístění
(celkový úhel), celkový počet karet pro každého hráče a počet karet, po kolika se rozdává.
|
 |
Kvido
— robot ze stavebnice Fischer Technik
pro Noc vědců 2020 (která se konala on-line) jsem natočil krátké video o tom, jak se
robot Kvido učí "chodit". Ve zkratce ukazuje postupné kroky při programování
jednoduchého robota. Od krátkého pohybu až po vyhýbání se překážkám.
Aktualizace: 25.5.2022 Kvido a jeho kamarádi tančí čtverylku |
 |
Robot Arm
— 3-osý manipulátor
Model průmyslového robota slouží k výuce základů robotiky.
Programuje se podobně jako „opravdové“ roboty metodou teach-in (naučení bodů a jejich využití v programu)
Aktualizace: 14.5.2023 Sisyfos |
|
Otto
— chodicí a tančící robot
|
 |
Scara
— manipulátor
po půlroce s "hraním" si se stavebnicí FischerTechnik na kroužku robotiky se kluci rozhodli pro stavbu vlastního robota. Cílem projektu je postavit funkční manipulátor - ruku koncepce Scara.
Dílo postupuje rychle kupředu, po dvou týdnech byl hotov úchopový mechaniznus, další tři týdny vznikalo rameno a nyní se pracuje
na svislém pojezdu.
|
 |
BBot
— balancující robot
již před delší dobu jsem si chtěl postavit balancujícího robota. Jednou jsem se o to již pokusil na podvozku z Robiho, ale ne příliš úspěšně. Serva jako pohony byla málo dynamická, a tak výsledek nesplinil očekávání.
Nedávno jsem narazil na pěknou konstrukci balancujícího robota B-robot Evo 2 vyrobeného 3D tiskem.
Bylo rozhodnuto a v krátké době vznikl BBot.
|
 |
Plot Clock
— kreslicí robot s paralelní kinematikou
|
 |
3D scanner
— na koleně
Pravděpodobně už jste někde zařízení nazývané 3D scanner viděli. Slouží k získání počítačového - virtuálního modelu reálného předmětu. Průmyslové skenery používané ve stavebnictví, strojírenství, ale i dalších oborech jako umění a počítačové hry jsou poměrně drahá zařízení. Co si však takový skener postavit ...
|
 |
Polar Graph
— trocha robotického umění
již před delší dobou jsem narazil na zajímavou konstrukci "robota - sprejera" Hectora.
Nyní dozrál čas a "umělec" podobné konstrukce je na světě.
|
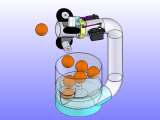 |
Table Tennis Robot
— robot na stolní tenis
na jaře přišel jeden hráč stolního tenisu s dotazem, jestli bych nebyl schopen navrhnout a sestrojit robota na stolní tenis.
Nejdřív jsem si vůbec nedokázal představit, o co jde. Ale po prohledání internetu jsem si celkem udělal představu.
|
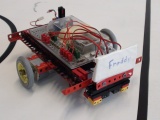 |
Freddy
— robot kategorie Stopař
Autonomní robot sledující čáru byl postaven pro soutěž Merkur Robo Day.
Robot je z velké části postaven ze stavebnice Merkur.
Zbylá část robota je postavena ze stavebnice Fisher technik.
|
 |
Delta
— manipulátor s paralelní kinematikou
|
 |
Cube solver
— aneb Když si robot hraje, (konstruktér) nezlobí!
Impulsem k tomuto dílku bylo shlédnutí několika videí (youtube), na kterých
rubikovu kostku skládají i roboti z Lega. Zároveň to byla výzva k dokončení několika
odložených projektů; vyřešení kinematiky průmyslového manipulátoru a napsání SW
alespoň pro jeho základní řízení, zpracování obrazu a na konec, jak se ukázalo,
i řešení síťové komunikace.
|
 |
RoboCar
— robot pro outdoorovou soutěž Robotour
|
 |
Robi
— vývojová robotická platforma
Tento robotický podvozek byl navržen jako několikátý ve vývojové řadě
malých diferenciálně řízených robotů (DAN, Karel).
Cílem bylo vytvořit univerzální podvozek pro testování různých senzorů a
algoritmů. Dalším požadavkem byla možnost opakovatelné výroby (bez použití
obtížně vyrobitelných či sehnatelných dílů) i pro další robotiky.
|
 |
Eurobot - roboty
— rychnovských týmů pro soutěž Eurobot
Zde najdete stručný popis robotů, se kterými se zúčastnily souteže Eurobot
studentské týmy klubu robotiky VOŠ a SPŠ Rychnov nad Kněžnou.
|
 |
DAN
— robot kategorie MicroMouse
Autonomní robot s diferenciálním řízením DAN byl postaven pro soutěž ISTRobot 2003.
Původně měl být schopen absolvovat jak kategorii Path Follower tak MicroMouse.
Ovšem po problémech se senzory jsem dal přednost kategorii MicroMouse.
Celá konstrukce je podřízena co největší jednoduchosti a co nejnižší ceně.
|