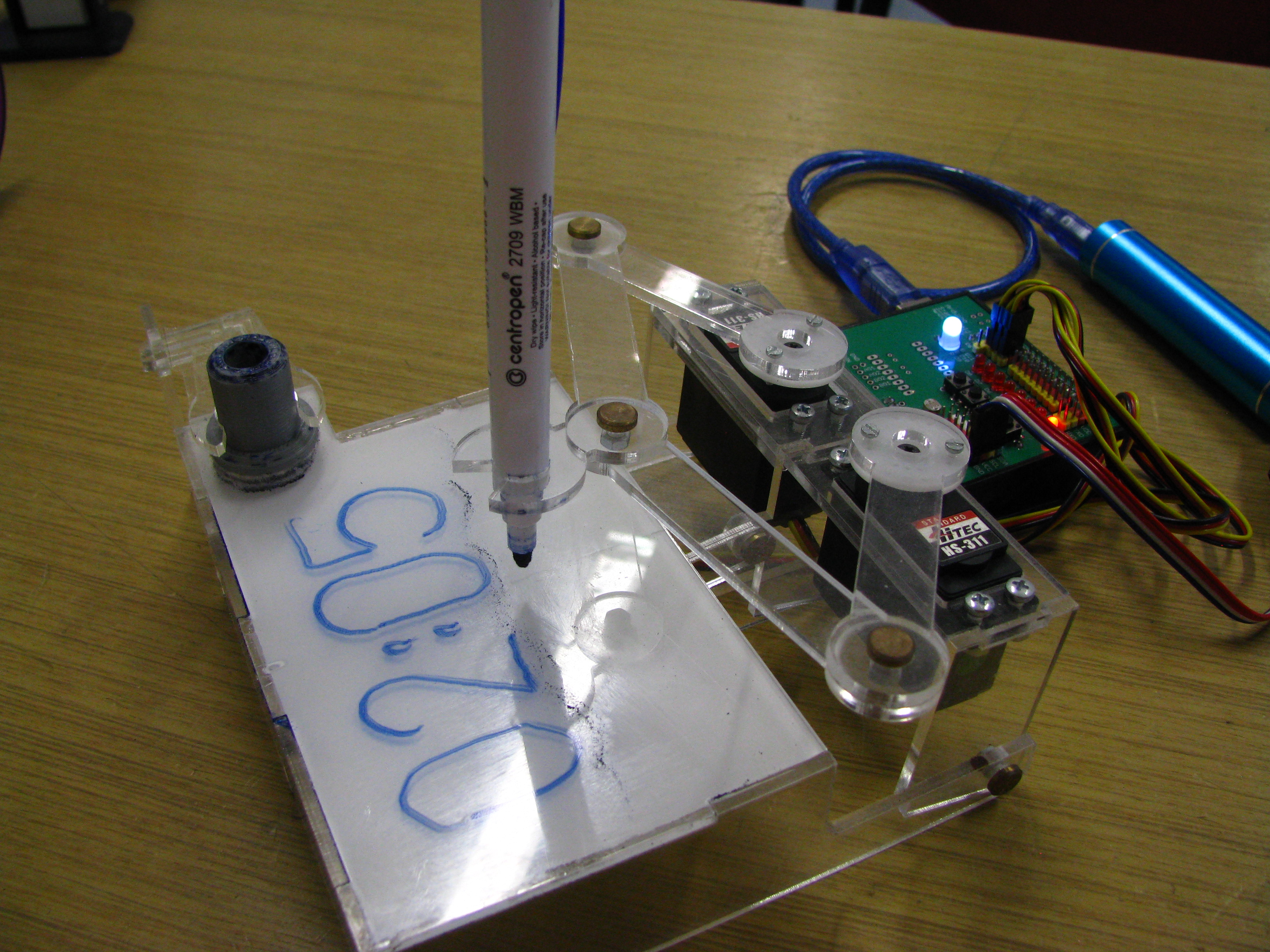
Plot Clock
kreslicí robot s paralelní kinematikou
Základní údaje

- Autor
- Martin Locker
- Řídicí procesor
- Atmel ATmega328 16MHz (Arduino Uno)
- Pohon
- 3x servo Hitec HS-322
- Programovací jazyk
- C
- Koncepce
- Manipulátor s paralelní kinematikou
- Pracovní prostor
- cca 80 x 40 mm
Popis architektury
Mechanická konstrukce je sestavena z dílů vyříznutých laserem z plexi tlouťky 3 mm. Pohon zajišťují tři serva.
Software řeší inverzní úlohu kinematiky. Polohu lze tedy zadávát přímo v kartézských souřadnicích.
Pro ukázku funkce bylo implementováno vykreslování aktuálního času.