Delta
manipulátor s paralelní kinematikou
Základní údaje

- Autor
- Martin Locker
- Řídicí procesor
- Atmel ATmega8 8MHz
- Pohon
- 3x servo Hitec HS-322
- 1x servo Hitec HS-55
- Programovací jazyk
- C
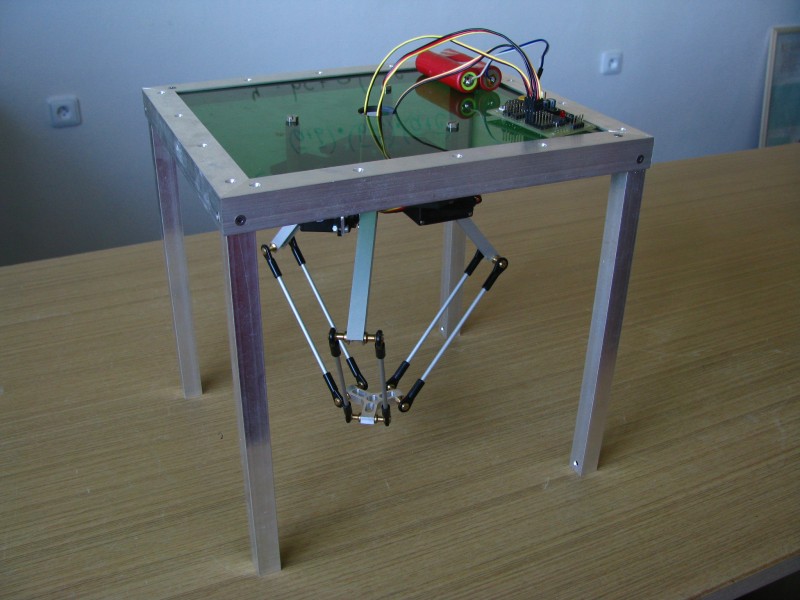
- Koncepce
- Manipulátor s paralelní kinematikou DELTA
- Pracovní prostor
- cca 100 x 100 x 100 mm
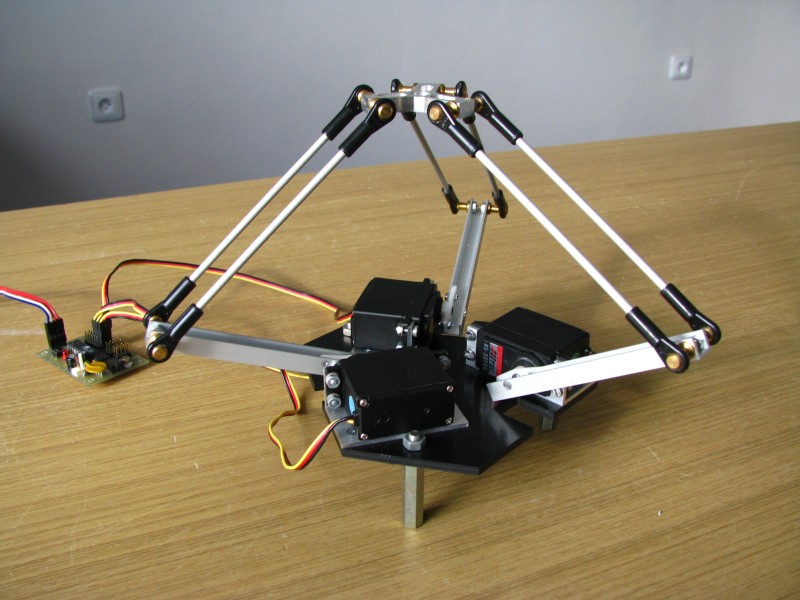
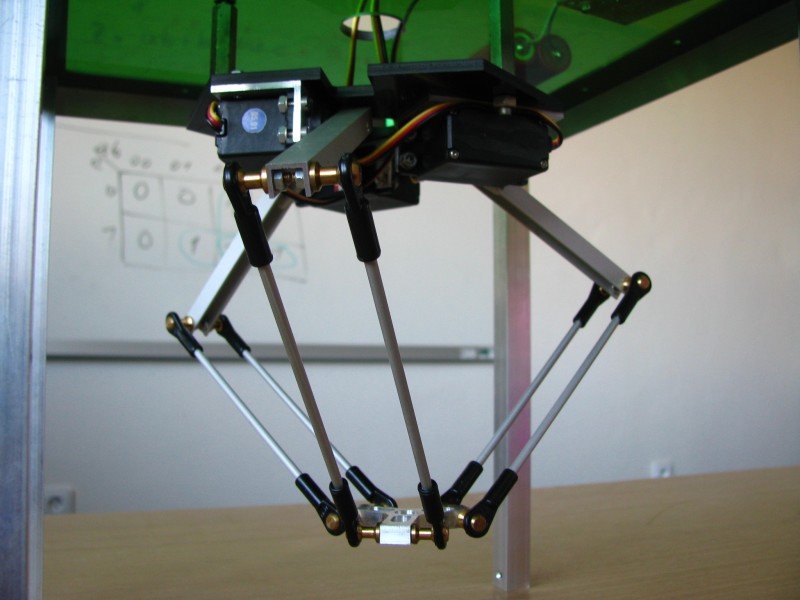
Popis architektury
Mechanická konstrukce je podřízena maximální jednoduchosti.
Na plastové desce jsou připevněna 3 serva po 120°. Na výstupní páku serva jsou připevněny
úhelníky zakončené kulovými čepy (průměr 3mm). Přes táhla je připevněna deska nesoucí
uchopovací mechanizmus opět přes kulové čepy.
Řízení
Během jednoho víkendu se mi podařilo dát dohromady inverzní i přímou úlohu kinematiky
(zopakoval jsem si matematiku a geometrii, abych nezakrněl )
a dokonce se mi podařilo inverzní úlohu nacpat do ATmega8 na 8MHz,
s tím že to stihne spočítat za cca 12ms. Takže zvládá počítat mezipolohy serv
pro lineární pohyb v každém "servo cyklu". Programování je v jazyku podobném
G-kódu.