

Robot Arm
3-osý manipulátor
Model průmyslového robota slouží k výuce základů robotiky.
Programuje se podobně jako „opravdové“ roboty metodou teach-in (naučení bodů a jejich využití v programu)
Aktualizace: 14.5.2023 Sisyfos
Základní údaje

- Autor
- Martin Locker
- Řídicí procesor
Atmel ATmega328 16MHz (Arduino Uno)- STM32F103 (BluePill)
- Pohon
- 3x krokový motor NEMA17
- 1x servo SG-90
- Programovací jazyk
- C
- Koncepce
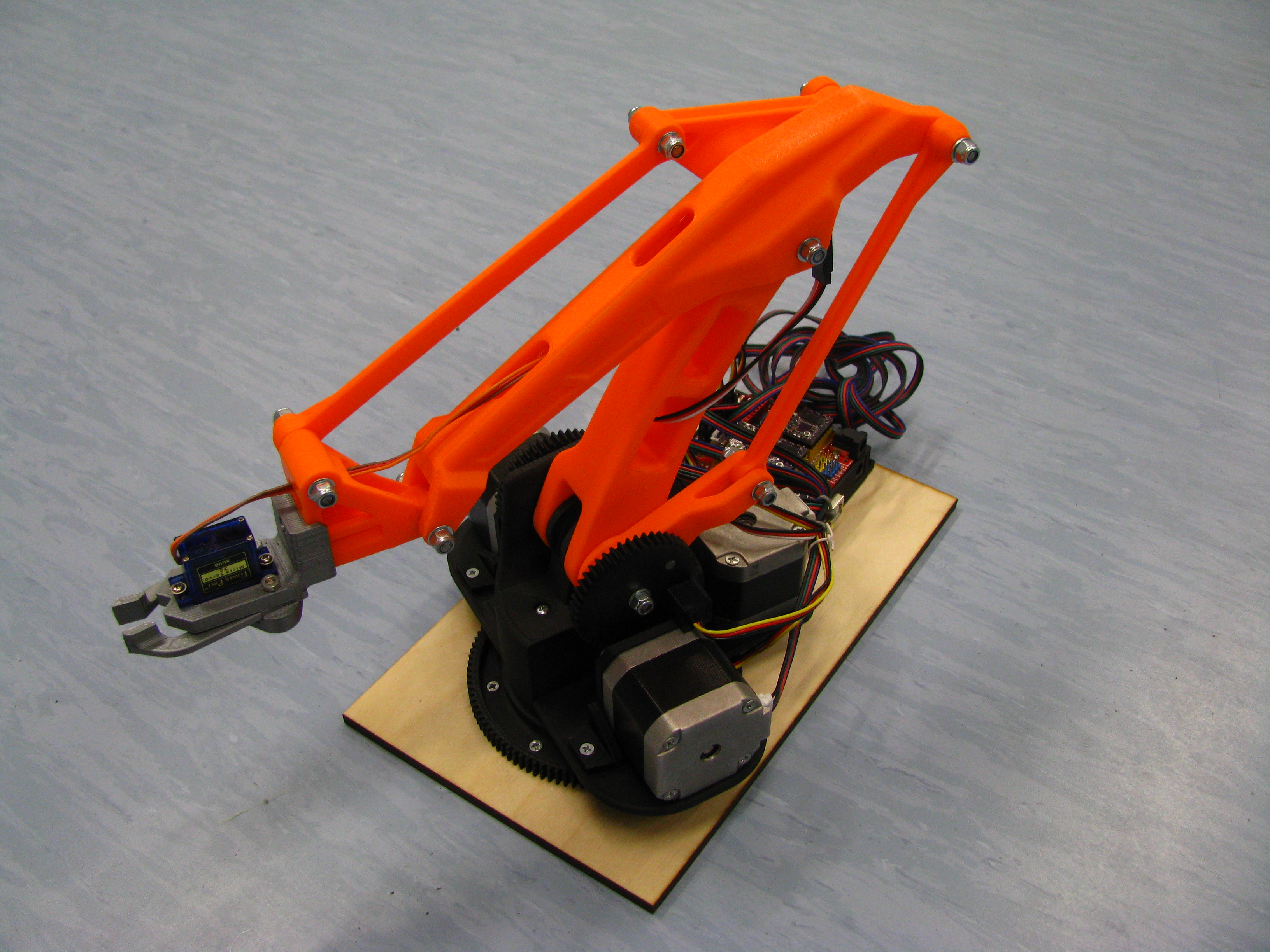
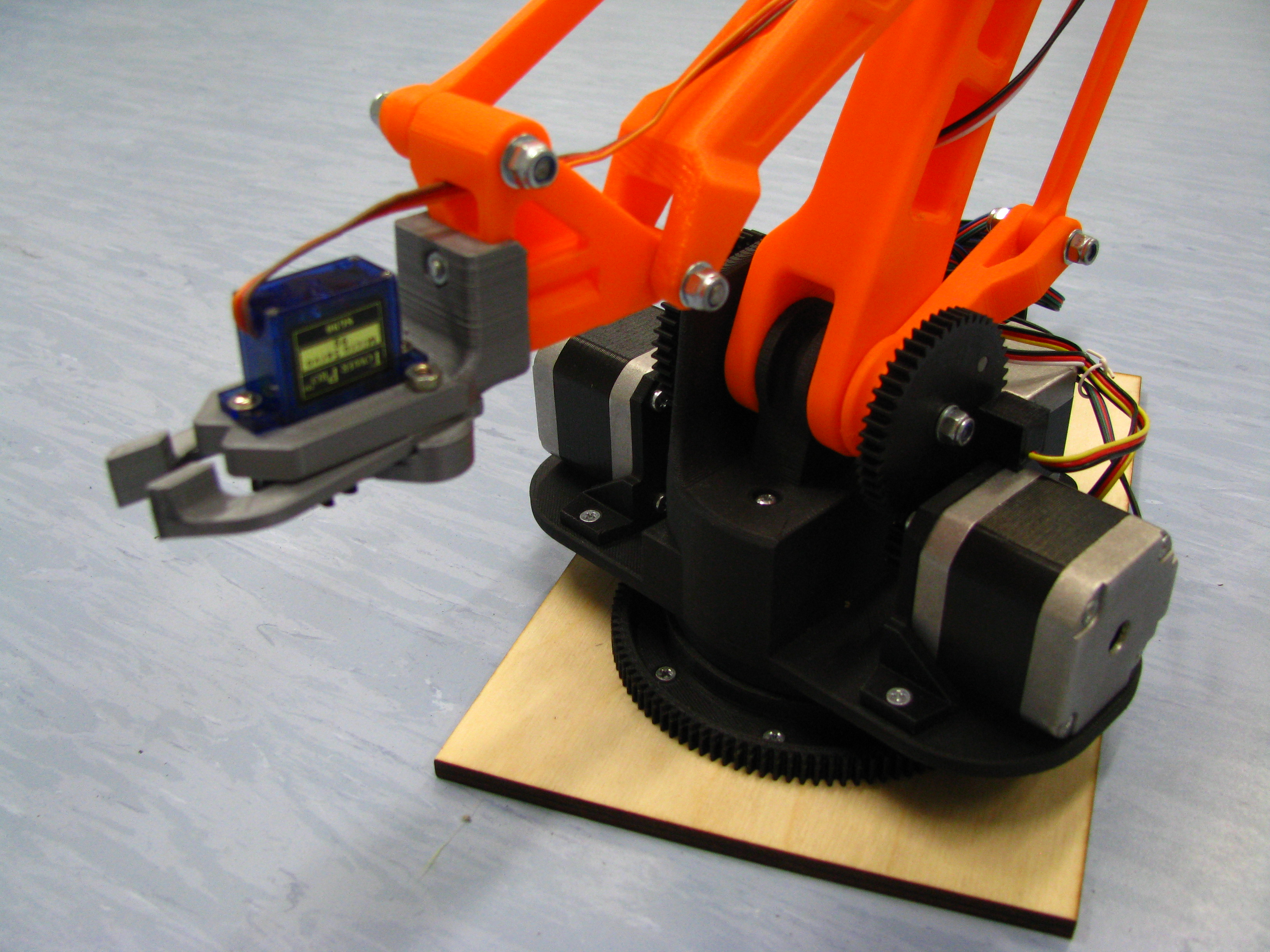
- Angulární manipulátor s paralelogramem
Popis architektury
Použitá kinematická struktura vychází z konstrukce běžně používaných manipulátorů.
Má pouze 3 stupně volnosti, ale využívá paralelogram pro zajištění stálé orientace uchopovacího zařízení.
Díky tomu je konstrukce lehká (pohony jsou na základně robota).
Mechanická část je sestavena z dílů vyrobených 3D tiskem.
Pohon ramene zajišťují krokové motory přes ozubené převody,
uchopovací zařízení je poháněno mikroservem.
Řízení upraveným systémem GRBL s doplňenou inverzní kinematikou.
Protože se do paměti již nevešel interpolátor pro lineární a kruhový pohyb, bude celý systém portován do STM32.
Obrázky
14. května 2023 - Sisyfos (když si robot hraje, nezlobí)
Konečně byla vyměněna elektronika, mozkem je mikrokontroler STM32F103
(BluePill) doplněný drivery pro řízení krokových motorů.
Firmware je upravený GRBL, doplněn o výpočet inverzní kinematiky a lineární
interpolaci.

Pro propagační účely (Maker Faire 2023) je doplněn toboganem s optickou branou.
Robot si pouští v nekonečném cyklu kuličku.
Robot si pouští kuličku
Použité zdroje
[3] GRBL for STM32