

Robotino
výukový robot od firmy FESTO
Na naší škole se již několik let vyučuje robotika, a to jak "klasická" průmyslová, tak i mobilní. Vedle výuky pracuje na naší škole klub robotiky, kde se žáci věnují právě mobilní robotice. Výsledkem činnosti tohoto klubu jsou i velmi dobré výsledky na světových soutěžích mobilních robotů. Díky získaným zkušenostem v tomto oboru pořádáme tématicky zaměřené semináře robotiky pro zájemce z dalších škol. Jednoho z těchto seminářů se zúčastnil i pan Andršt, zástupce firmy Festo. Takže když jejich firma hledala vhodnou střední školu, která by otestovala školní výukový robot Robotino a ověřila jeho vhodnost pro výuku, byla vybrána právě ta naše

Robot Robotino je mobilní robot určený pro výukové účely. Má kruhový půdorys o průměru 370mm, hmotnost 11kg a maximální rychlost 2m/s. Používá podvozek se všesměrovými koly. Konstrukce podvozku je tvořena laserem svařenými díly z nerezového plechu. Každé kolo je poháněno samostatným motorem a díky tomu má robot výbornou manévrovatelnost. Může se pohybovat libovolným směrem a současně se i otáčet. Směr pohybu je dán skládáním rychlostí jednotlivých kol, proto musí být pohony velmi dobře řízeny. Regulaci rychlosti otáčení zajišťují PID regulátory, které získávají informaci o aktuálních otáčkách pomocí optických inkrementálních snímačů na motorech. Napájení pohonů i dalších částí robota zabezpečují dva olověné bezúdržbové akumulátory, které zajistí více než jednu hodinu trvalého provozu.
Mozkem robota je průmyslový jednodeskový počítač standardu PC104 s operačním systémem RT Linux. Rozhraní mezi ním a vlastním hardwarem robota zajišťuje speciální modul s jednočipovým mikrokontrolerem Atmel. Na tento modul jsou kromě pohonů připojeny senzory robota a na rozšiřující konektory je možné připojit další senzory a aktuátory.
V základním vybavení robota je taktilní nárazník pro detekci kolizí, 9 infračervených triangulačních dálkoměrů Sharp s rozsahem 4-30cm, dva limitní optické snímače a jeden analogový indukčnostní snímač polohy. Přímo k řídicímu počítači je připojena USB kamera pro získání obrazové informace.
Doplňkovým modulem je navigační systém NordStar, který využívá optické lokalizace robota při pohybu v místnosti.
Programování robota je možné na několika úrovních. Nejjednodušší je použití grafického systému RobotinoView. V tomto systému jsou připraveny bloky pro přístup k hardwaru robota, pro zpracování dat a pro jejich zobrazení. Tím lze velmi snadno sestavit a odladit algoritmy pro řešení rozličných úloh. Takto vytvořený program se spouští přímo na osobním počítači, který komunikuje s robotem pomocí Wi-Fi.
Další možností je využití některého z vyšších programovacích jazyků C++, Java, Python a API pro přístup k hardwaru robota. To umožňuje programátorovi využít naplno možností tohoto systému. Vlastní program může běžet buď přímo na PC a komunikovat s hardwarem přes Wi-Fi nebo může být zkompilován přímo pro cílový systém. Po přenesení do řídicího počítače robota se tak robot stává zcela autonomním.
Základní parametry robota
- Mobilní robot
- Podvozek se všesměrovými koly
- Kruhový půdorys o průměru 370 mm
- Hmotnost 11 kg
- Maximální rychlost 2m/s
Všesměrový podvozek

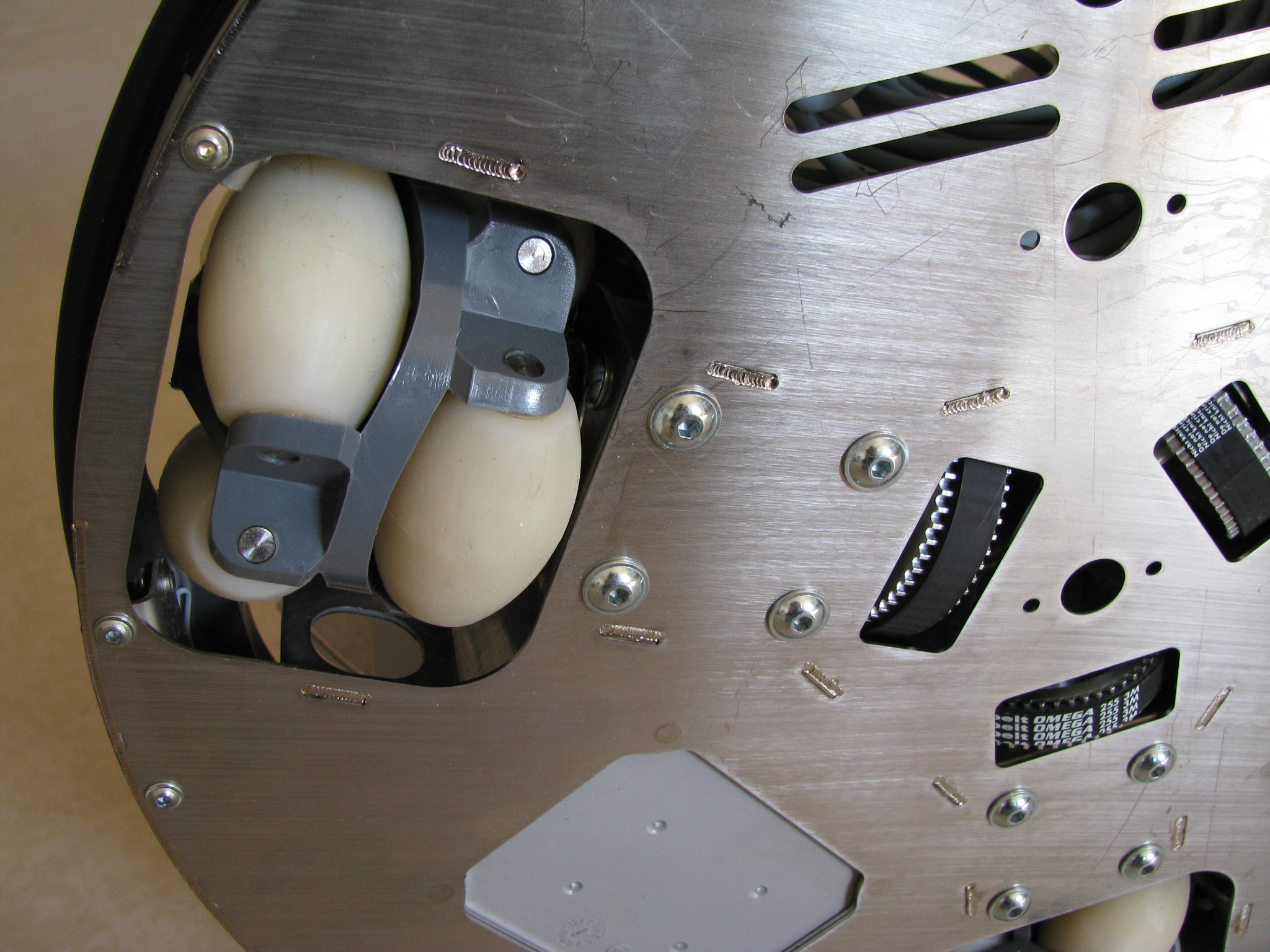
Kinematika všesměrového podvozku
 |
 |


Pohonná jednotka
- Stejnosměrné elektromoty 24V
- Optický inkrementální snímač
- Všesměrové kolo Omniwheel
- Planetová převodovka
- Převod ozubeným řemenem

Řídicí jednotka
- Řídicí počítač průmyslového standardu PC-104 (procesor VIA Eden 300 MHz)
- Operační systém RT Linux
- Jednočipový mikrokontroler řady AVR ATmega pro řízení pohonů a obsluhu senzorů (rozhraní pro připojení digitálních a analogových senzorů a aktuátorů)
- Komunikace s PC pomocí WiFi
Senzorika
- Optické inkrementální snímače úhlu natočení
- Nárazník
- IR triangulační dálkoměry SHARP GD2D120 (4-30 cm), 9x
- USB web kamera
- Optické limitní snímače
- Indukčnostní analogový snímač






Systém lze rozšířit o další senzory a akční prvky průmyslových standardů (digitální 24V, analogové 0-10V)
Dále lze využít systém NordStar pro lokalizaci robota.
 Rozhraní pro připojení senzorů a akčních prvků |
 Lokalizační systém NordStar |
Napájení
Bezúdržbové gelové Pb akumulátory 2x 12V/4Ah
Programování
- Grafický systém RobotinoView (řízeno z PC přes WiFi)
- Jazyk C++, Java pro PC, komunikace pomocí WiFi
- Jazyk C++, Java pro RT Linux (obě platformy využívají stejné API)
 Programování - RobotinoView |
Využití ve výuce robotiky
- Principy řízení mobilních robotů
- Řízení všesměrového podvozku (přímá a inverzní úloha kinematiky)
- Algoritmy reakčního chování
- Lokalizace (odometrie)
- Navigace
- Využití zpracování obrazu
 Základní úlohy mobilní robotiky |
Využití ve výuce automatizace
- Pohony a jejich řízení
- - Principy řízení DC motorů
- - Regulace rychlosti
- Senzorika
- - Principy funkce optických senzorů, indukčnostních senzorů, senzorů vzdálenosti
- - Zpracování obrazu
 |
Internet: www.festo.com/didactic
www.openrobotino.org
Dotazy: dka@de.festo.com